
Laboratorium pneumatyki mieści się w budynku A18 (Fabryka Inżynierów XXI wieku) w pomieszczeniach 014 i 016 oraz w budynku A20 pomieszczenie 02.
Opiekun laboratorium: dr inż. Michał Krępski
Stanowiska Badania Pneumatyki i Elektropneumatyki

- firmy SMC Corporation – dwa stanowiska z dwustronnymi panelami montażowymi do budowy układów sterowania pneumatycznego i elektropneumatycznego przystosowane do szybkiego, samodzielnego montażu układów przez studentów.
Do dyspozycji studentów jest bardzo bogaty, rozszerzony zestaw elementów pneumatyki i elektropneumatyki równoważny zestawowi PNEU-205 poszerzonemu o niepokrywające się z elementami tego zestawu elementy z zestawów PNEU-202, PNEU-203 i PNEU-204. Elementy pneumatyczne wyposażone są w złącza wtykowe umożliwiające szybką pracę.
Nauczyciel dysponuje płytą CD-ROM i podręcznikiem z podstawami technicznymi oraz z zadaniami do wykonania. Dysponuje też rozwiązaniami zadania postawionego przed studentami. - firmy FESTO – stanowisko z dwustronnym panelem montażowym służące do budowy układów pneumatycznych. Ma już ponad 20 lat. Ma ograniczoną, niewielką ilość elementów.
- firmy MECMAN (Rexroth) – stanowisko z jednostronnym panelem służące do budowy prostych układów pneumatycznych. Ma już ponad 20 lat. Ma ograniczoną, niewielką ilość elementów.
Stanowisko Badania Pneumatycznego Napędu Proporcjonalnego – firmy SMC Corporation
Stanowisko z jednostronnym pionowym panelem montażowym do budowy układów pneumatycznej techniki proporcjonalnej. Zawiera zestaw elementów do montażu – PNEU-206 firmy SMC Corporation.
Elementy wyposażone są w złącza wtykowe umożliwiające szybką pracę.
Nauczyciel dysponuje płytą CD-ROM i podręcznikiem z podstawami technicznymi oraz z zadaniami do wykonania. Dysponuje też rozwiązaniami zadania postawionego przed studentami.
Stanowisko Badania Pneumatycznych Siłowników Beztłoczyskowych – firmy SMC Corporation

Stanowisko demonstracyjne techniki beztłoczyskowej umieszczone na pionowym panelu mocowanym do stelażu stołu. W skład stanowiska wchodzą dwa siłowniki beztłoczyskowe: jeden ze sprzężeniem mechanicznym, drugi ze sprzężeniem magnetycznym. Każdy z siłowników posiada komplet zaworów do sterowania kierunkiem i prędkością.
Stanowisko Badania Pneumatycznych Siłowników z Hamulcami – firmy SMC Corporation
Stanowisko demonstracyjne układów pneumatycznych z siłownikami o różnych systemach blokowania tłoczysk, umieszczone na pionowym panelu mocowanym do stelażu stołu.
Zawiera trzy różne odmiany siłowników:
- z hamulcem i dwoma różnymi systemami sterowania,
- z mechanicznymi ryglami na końcu skoków,
- z blokadą.
Studenci samodzielnie uruchamiają poszczególne siłowniki, poznają je i opisują ich działanie.
Stanowisko Badania Pozycjonowania Pneumatycznego – firmy SMC Corporation
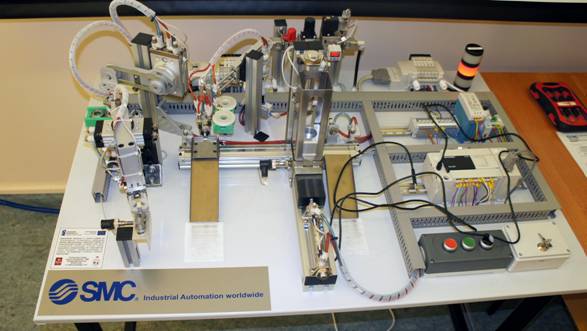
Stanowisko umieszczono na poziomym panelu. Zawiera bardzo dużą ilość różnorodnych komponentów z zakresu pneumatyki, elektropneumatyki, sensoryki, chwytaków, wysp zaworowych i sterowania PLC.
Demonstruje zastosowania elementów elektropneumatycznych w przemyśle.
Na stanowisku wykonywany jest montaż 4 elementów: korpusu, łożyska, wałka i pokrywki.
Cykl pracy wygląda następująco:
-
pobranie korpusu z pionowego magazynu – za pomocą siłownika dwustronnego działania.
- włożenie łożyska do korpusu – realizowane za pomocą siłownika wahadłowego z ramieniem.
- osadzenie wałka w łożysku – realizowane za pomocą napędu obrotowo-liniowego.
-
nałożenie pokrywki – realizowane zestawem 3 chwytaków podciśnieniowych i układem dwóch siłowników o ruchu prostoliniowym.
- podanie zmontowanego zespołu poza stanowisko.
Korpus jest sprawdzany (mierzony otwór za pomocą siłownika pneumatycznego z odpowiednią końcówką) i jeśli jest dobry i prawidłowo podany – trafia na następne stanowisko. Jeśli zły – jest odrzucany do braków.
Chwytak przenoszący wałek wyposażony jest w czujnik mogący „zmierzyć” wałek. Jeśli średnica wałka jest za mała – układ zatrzyma się i zasygnalizuje awarię.
Stanowisko pracuje pod kontrolą sterownika firmy MITSUBISHI. Do sterownika są podłączone dwie wyspy zaworowe sterujące pracą siłowników, oraz bardzo duża ilość czujników.
Prowadzący zajęcia ma możliwość zasymulowania 16 różnych przypadków błędów. Zadaniem studentów jest analiza działania i znalezienie przyczyn awarii układu.
Stanowisko Komputerowego Modelowania i Symulacji Układów Pneumatycznych, Hydraulicznych i Elektrycznych
Stanowisko składa się z pięciu komputerów PC z monitorami LCD oraz dwóch drukarek laserowych (monochromatyczna i kolorowa). Komputery wyposażono w oprogramowanie służące do budowy na ekranie układów pneumatycznych, hydraulicznych i sterowania elektrycznego, oraz do symulacji działania tych układów.
Dysponujemy następującymi programami w wersjach edukacyjnych:
- Automation Studio v. 5.6 – firmy FAMIC,
- AUTOSIM-200 v.2 – firmy SMC,
- PneuDraw 2.5 – firmy SMC.
Stanowiska komputerowe wykorzystywane są także do pisania programów na sterowniki PLC sterujące pracą układów pneumatycznych.
Do tego celu zainstalowano następujące programy:
- PROGRAMMER v.4 – firmy OMRON,
- U90 LADDER – firmy UNITRONICS.
Stanowiska Do Testowania Programów Na Sterownik PLC – 4 szt.

Są to dwa stanowiska z dwustronnymi panelami. Na każdym z paneli zainstalowano po kilka siłowników (od 4 do 7), wyspy zaworowe – firmy ASCO NUMATICS oraz REXROTH, oraz szafkę sterownika firmy OMRON.
Studenci otrzymują od prowadzącego zajęcia diagram ruchu siłowników i piszą program sterujący w języku drabinkowym.
Pneumatyczny Manipulator Dwuramienny

Pierwotnie manipulator ze sterowaniem „czysto pneumatycznym” pracował przy szlifierce lub polerce do noży kuchennych – podawał z magazynu półfabrykaty i odbierał z obrabiarki elementy obrobione.
Został poddany modernizacji polegającej na całkowitym demontażu, wymianie uszkodzonych części mechanicznych oraz całkowitej wymianie sterowania pneumatycznego. Dodatkowo dobudowano sterowanie elektroniczne za pomocą sterownika OPLC firmy UNITRONICS.
Aktualnie zadaniem manipulatora jest pobranie jednym ramieniem detalu z magazynu i podanie do siłownika mocującego, oraz odebranie drugim ramieniem i przekazanie do magazynu.
Manipulator może pracować pod dwoma niezależnymi systemami:
- sterowanie „ czysto pneumatyczne’ – zastosowano elementy systemu ATEX firmy PARKER,
- sterowanie elektroniczne – sterownik OPLC firmy UNITRONICS.
Studenci zapoznają się z pracą poszczególnych systemów, analizują diagram ruchu siłowników.